
单纯形法(数学术语)
温馨提示:这篇文章已超过424天没有更新,请注意相关的内容是否还可用!
单纯形法
数学术语
单纯形法,可按现代电子计算机标准程序求解线性规划模型的一般方法。分为代数形式的单纯形法和表格形式的单纯形法。前者提供基本算法所依据的逻辑规则,适用于在电子计算机上进行求解运算;后者将变量和数据列成表格,适用于笔算。两者在数学上是等价的。
单纯形法是由美国数学家G.B.丹齐克(1914~)于1947年提出来的,它与苏联数学家Л.Β.坎托罗维奇(1912~)于1938年提出的解乘数法相类似。
| 中文名 | 单纯形法 |
| 外文名 | Simplex algorithm |
| 提出者 | George Bernard Dantzig |
| 提出时间 | 1947年 |
| 应用学科 | 数学 |
| 适用领域范围 | 线性规划 |
正文
根据单纯形法的原理,在线性规划问题中,决策变量(控制变量)的值称为一个解,满足所有的约束条件的解称为可行解。使目标函数达到最大值(或最小值)的可行解称为最优解。这样,一个最优解能在整个由约束条件所确定的可行区域内使目标函数达到最大值(或最小值)。求解线性规划问题的目的就是要找出最优解。
可能出现下列情况之一:
①存在着一个最优解;
②存在着无穷多个最优解;
③不存在最优解,这只在两种情况下发生,即没有可行解或各项约束条件不阻止目标函数的值无限增大(或向负的方向无限增大)。
要缩小对最优解的搜索范围,就必须认识最优解的一般性质,最优解如果存在的话,则它必然处于可行区域的边界上。
任何一项约束条件的边界方程是用“=”号来替换该约束条件中的“≤”或“≥”号而得到的。每一个边界方程确定一个超平面。因此,可行区域的边界是由那些满足一个或同时满足几个边界方程(即处在作为边界的一个或几个超平面上)的可行解所组成,而且最优解必在其中。最优解不仅是在可行区域的边界上,而且也在这个区域的一个隅角上。
一个可行解,如果不处在由另两个可行解连接起来的任何线段上,它就是一个角点可行解。如果连接两个角点可行解的线段处在可行区域的边界上,这两个角点可行解就称为相邻的角点可行解。角点可行解具有下列三个重要性质:
①如果存在着一个最优解,那么它必定是角点可行解。如果存在有多个最优解,那么至少有两个最优解必定是相邻的角点可行解。
②只存在有限个数的角点可行解。
③如果一个角点可行解按目标函数值来衡量时比其所有的相邻角点可行解更好一些,那它就比所有其他角点可行解都更好,也就是最优解。
上述这些性质构成单纯形法的原理基础。最后一个性质的重要性在于它为一个角点可行解是否是最优解提供了一种简便的检验标准,因而毋需列举所有的可行解。单纯形法正是利用了这个性质,只要检查少数的角点可行解,并且一旦这个最优性检验获得通过就可立即停止运算。
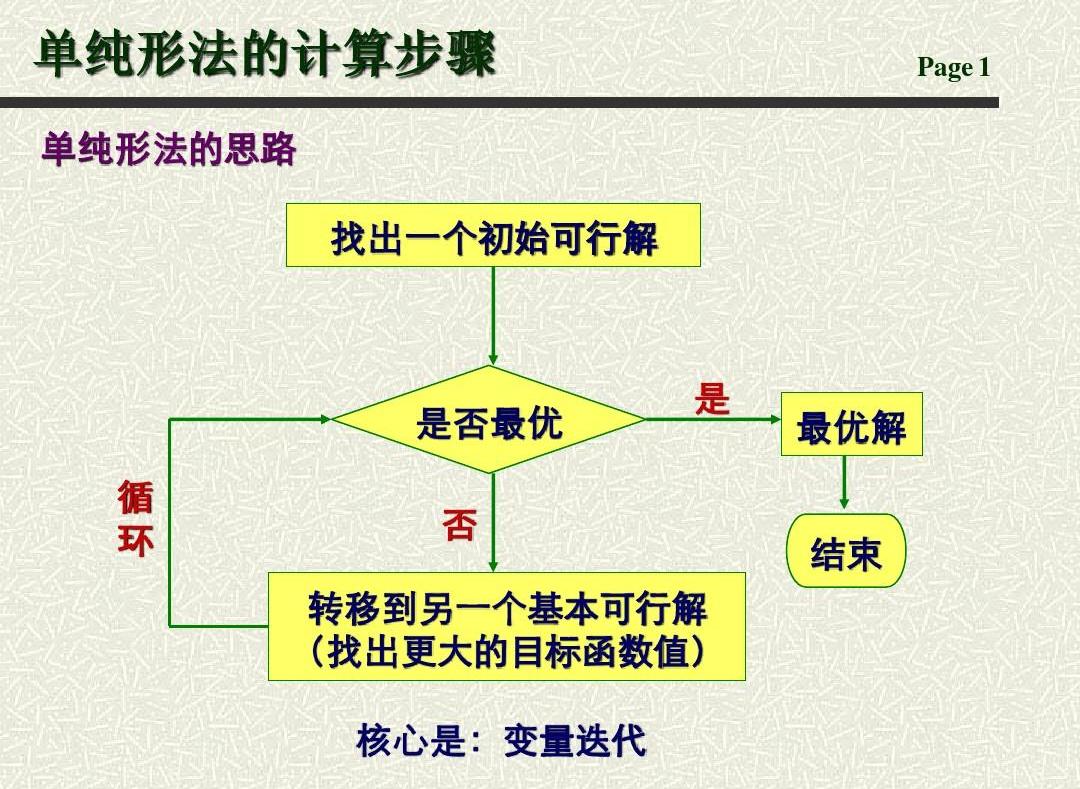
单纯形法的运算步骤可归结为:①起始步骤──在一个角点可行解上开始。②迭代步骤──移动至一个更好一些的相邻角点可行解(根据需要反复进行这一步骤)。③停止法则──在当前角点可行解比所有相邻角点可行解都更好些时停止。当前角点可行解就是一个最优解。
单纯形法的优点及其成功之处在于它只需要较少的有限次数的迭代,即可找到最优解。
对偶
(Dual Simplex Method)1954年美国数学家C.莱姆基提出对偶单纯形法。单纯形法是从原始问题的一个可行解通过迭代转到另一个可行解,直到检验数满足最优性条件为止。对偶单纯形法则是从满足对偶可行性条件出发通过迭代逐步搜索原始问题的最优解。在迭代过程中始终保持基解的对偶可行性,而使不可行性逐步消失。
设原始问题为min{cx|Ax=b,x≥0},则其对偶问题(Dual Problem)为max{yb|yA≤c}。当原始问题的一个基解满足最优性条件时,其检验数cBB-1A-c≤0。即知y=cBB-1(称为单纯形算子)为对偶问题的可行解。所谓满足对偶可行性,即指其检验数满足最优性条件。因此在保持对偶可行性的前提下,一当基解成为可行解时,便也就是最优解。
其他信息
数学优化中,由George Dantzig发明的单纯形法是线性规划问题的数值求解的流行技术。有一个算法与此无关,但名称类似,它是Nelder-Mead法或称下山单纯形法,由Nelder和Mead发现(1965年),这是用于优化多维无约束问题的一种数值方法,属于更一般的搜索算法的类别。
这二者都使用了单纯形的概念,它是N维中的N+1个顶点的凸包,是一个多胞体:直线上的一个线段,平面上的一个三角形,三维空间中的一个四面体,等等。单纯形法在对线性规划问题实施求解过程中,有着可以提高运算效率的空间,为此人们研究并提出了可以减少计算量和存储空间的改进单纯方法。
参考资料
1.线性规划的单纯形算法研究及应用·中国知网
")
")
")
")